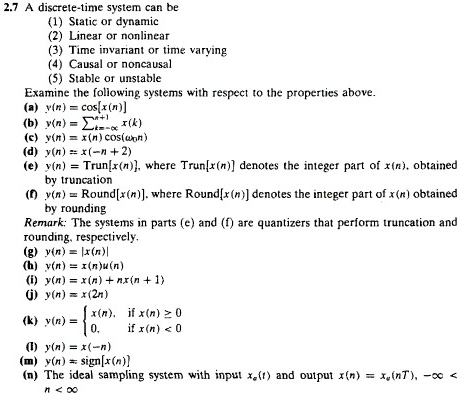
2.7 A discrete-time system can be
(1) Static or dynamic
(2) Linear or nonlinear
(3) Time invariant or time varying
(4) Causal or noncausal
(5) Stable or unstable
Examine the following systems with respect to the properties above.
(a)
(b)
(c)
(d)
(e) , where denotes the integer part of , obtained by truncation
(f) Round , where Round denotes the integer part of obtained by rounding
Remark: The systems in parts (e) and (f) are quantizers that perform truncation and rounding, respectively.
(g)
(h)
(i)
(j)
(k)
(i)
(m)
(n) The ideal sampling system with input and output